1
投資
【日經BP社報導】在5月21~23日於名古屋市國際展示場舉辦的“日本第18屆國際福祉健康產業展 Welfare2015”的“促進企業涉足醫療及福祉產業的業務研討會”上,豐田夥伴機器人部策劃總括室醫療護理組組長鴻巢仁司以“豐田夥伴機器人 醫療護理輔助機器人的開發”為題,介紹了該公司在醫療及護理領域機器人方面的舉措。
豐田不僅注重“製造好的汽車”,還重視“創建好的城市和好的社會”,正在以開拓可為未來交通社會提供支援的生活方式為目標,開發與人共生型機器人(夥伴機器人)。鴻巢說,豐田將通過這一舉措,“著眼於社會活力預計將會下降的少子老齡化社會,為提高生活品質作出貢獻”。

鴻巢仁司正在發表演講
長期開發工業機器人的豐田在2005年的“愛知世博會”上,曾經展示了演奏樂器的仿人機器人,並以此為契機,啟動了夥伴機器人的研究項目。從2007年開始,該公司與藤田保健衛生大學合作,使研究步入開發階段,最近“進入到了實用化階段”(鴻巢)。目前,該公司正在開發4種醫療護理輔助機器人。在演講中介紹了“平衡練習助手”和“步行練習助手”兩種。
在這些機器人的開發中,豐田把著眼點放在了運動學習理論上。運動學習是指根據經驗產生的相對恆定的行為變化。其促進要素大致有4個,分別是(1)轉移性(課題的相通性);(2)賦予動力;(3)行為變化(反饋、量和難易度);(4)保持和應用。
傳統的練習平衡的方法包括保持站立、單腳站立、利用平衡板等。這些方法的難度要嘛太小、要嘛太大,而且重複起來枯燥乏味,因為動作少,所以反饋也比較困難。
為此,豐田開發了平衡練習助手機器人。這款機器人是以站乘式個人助行機器人“Winglet”的倒立二輪技術為基礎開發的。因為體重(重心)的移動會反映到機器人的動作中,所以具有“平衡控制能夠可視化”(鴻巢)的特點。通過採用使重心移動與網球、滑雪等遊戲中的角色聯動的機制,用戶可以像玩遊戲一樣鍛鍊平衡功能。
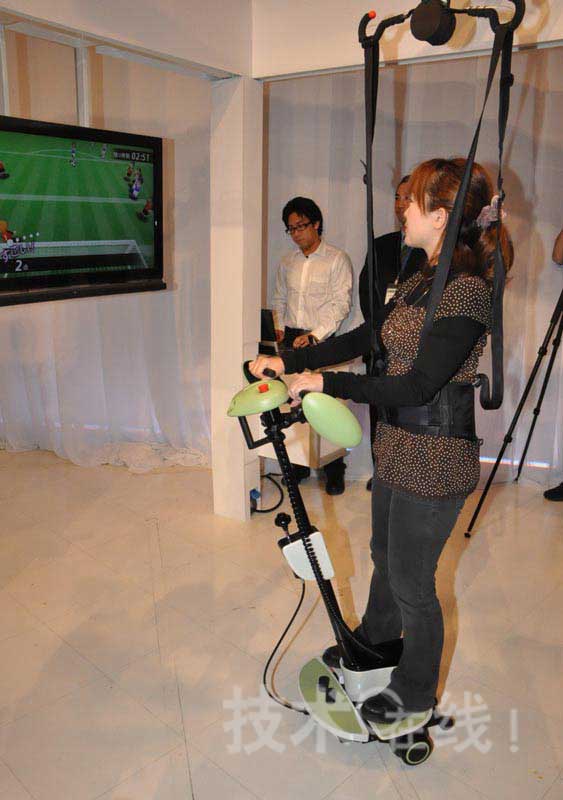
平衡練習輔助機器人
機器人的控制與人保持平衡的策略相似,所以轉移性高。因為運動量多,所以反饋也比較容易。通過組合多種遊戲進行訓練,“可以提高總體的平衡能力”(鴻巢)。
步行練習方面,以前一直是使用支撐到大腿的“長下肢裝具”和支撐到小腿的“短下肢裝具”。前者雖然可以平穩步行,但膝蓋不易活動,而後者雖然膝蓋容易活動,但伴有膝蓋發軟的隱憂。而且,二者都需要護理員陪伴,難以獲得運動反饋,因為每個人步行的方式和目標均不相同,所以也缺乏轉移性。調整訓練的難易度也比較困難。
為此,豐田開發的步行練習助手的膝部配備了馬達,腳底配備了載荷感測器。在直立時會利用馬達的力使膝蓋保持舒展,擺腿時則借助馬達作出膝蓋彎曲動作。
這種機器人能調整邁腿動作中對膝蓋的輔助量,可配合功能的恢復,作出減少輔助量等調整。從初期階段開始,步行動作就接近目標,所以轉移性很好,而且一開始即可步行,容易讓用戶產生動力。因為可以監控載荷和膝蓋角度的變化等,獲得多樣化的資訊,所以也容易進行運動反饋。

行走練習助手
豐田已經開始面向復健輔助等用途,向醫療機構等提供這些醫療護理輔助機器人。不過鴻巢認為,這些機器人的正式商業化運作“還存在很多需要解決的課題”。
對於這些新領域商品的商業化,需求程度、相應的技術水準、成本這三者的平衡將成為關鍵。其中,技術水準在不斷的開發中有了長足進步,然而,“在市場規模有限的現狀下,降低製造成本非常困難。我們雖然在利用與汽車通用的部件等方法降低成本,但是在(機器人的)引進階段,可能還必須借助普及支援政策的力量”(鴻巢)。
鴻巢還表示,必須儘早把海外發展納入視野。為此,與相關學會和團體的合作非常重要。(記者:大下淳一,日經數位健康)
《日經技術在線授權轉載》
超好賺!
每天都有任務能拿獎勵,快點擊查看!