

2009 年 Google 實驗室 (Google X) 推出 Project Chauffeur,關注自動駕駛、機器人技術、自動化和智慧感測器等領域;2015 年 10 月,該項目實現了全球首次全自動駕駛路測 (沒有方向盤,沒有控制踏板) ; 2016 年 12 月,項目從 Google 拆分出來成立獨立的新公司 Waymo (a new way forward in mobility) ,並歸屬於母公司 Alphabet 旗下。
本月初,外媒 (The Information) 披露, Waymo 將於年底在亞利桑那州的鳳凰城推出基於自動駕駛的叫車服務。摩根士丹利 (Morgan Stanley) 的分析師布萊恩·諾瓦克表示: Waymo 的估值可達 700 億美元。
作為最早投身自動駕駛研發的科技巨頭, Google / Waymo 的技術核心是什麼?他們如何定義自動駕駛及其前景?公司的商業化進程怎麼樣了?Waymo 最近公佈官方報告,從系統設計、工作原理、路測手段和汽車相關交互四個方面出發,闡述 Waymo 的全自動駕駛技術方案。
全自動駕駛的三大出發點

本質是在技術演進中挖掘市場需求/優越性。KPMG評估認為,自動駕駛技術可在 2014 到 2030 年間使得全球車禍死亡人數降低 2500;IHS Automotive 預測,無人駕駛量產汽車將在 2025 年上市,估計銷量可達 23 萬輛;英特爾(Intel, INTC-US) (Intel) 發佈報告稱,無人駕駛汽車市場的規模將在 2050 年前達到 7 兆美元。
強大的市場空間讓資本市場、傳統車企和科技巨頭們趨之若鶩。
Waymo 財務分析師 Shawn Bananzadeh 曾透露,從 Project Chauffeur 2009 年誕生到 2015 年末, Google 花費了 11 億美元開發無人駕駛汽車的軟體和硬體。此外,通用 (GM) 也在 2016 年斥資 10 億美元收購了舊金山半自動駕駛新創 Cruise Automation,英特爾 3 月砸了 153 億美元收購 Mobileye; Uber 因為買下 (6.8 億美元) Google 無人駕駛項目前研發人員從創立的 Otto,而與 Waymo 爭的沒完。

數字只是一種結果,真正驅動無人駕駛發展的是它帶來的安全性 (交通效益) 、高效性 (社會效益) 和交互體驗 (人機關係) 。
安全性方面,有研究顯示,94% 的交通意外是由人為操作失誤造成的,2013 年全球車禍死亡人數達 120 萬, 2016 年美國道路死亡人數 3 萬 7461 人,2015 年交通意外受傷人數 240 萬,近三分之二的人會捲入酒駕事故;
社會效益方面,每年由於交通事故死亡造成的經濟損失達 5940 億美元,直接經濟損失占 2770 億美元,燃油消耗和交通耗時相關的支出達 1600 億美元;
汽車交互方面,先來看駕駛者:全美有 300 多萬年長的 (40 歲) 、失明或視力較差的人;再看路人環境:79% 的 65 歲以上老年人生活在有汽車的社區;生活效率來看,每年人均在交通上耗費的時間高達 42 個小時。
綜上,自動駕駛的宗旨在於實現整個交通系統的高效性和安全性,減少車禍主要原因 — 人為操做失誤的發生,為年邁的、殘障的人士提供更為安全的社區環境,規劃路況以減少相關資源 (石油) 和時間的浪費。
Waymo 技術拆解
截至目前, Waymo 已經推出了第四代自動駕駛車輛,8 年間在美國 20 多個城市進行駕駛,路測里程達 350 萬英里,僅 2016 年就模擬自動駕駛了 25 億英里。這些結果,一輛沒有人的車是怎麼做到的?
事實上,自動駕駛汽車和人類駕駛員需要回答的駕駛問題是一樣的:
- 在哪兒?

當汽車在道路上,不是 GPS 就能回答這個問題,它需要知道自己在三維空間中的坐標點、道路狀況、行駛限制,以及人行道、道路信號燈、交叉路口、停車標誌等道路特性,也就是需要地圖和基於感測器的實時道路訊息。
- 周圍有什麼?
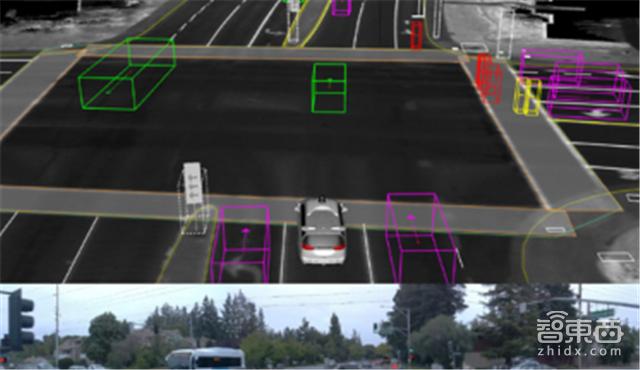
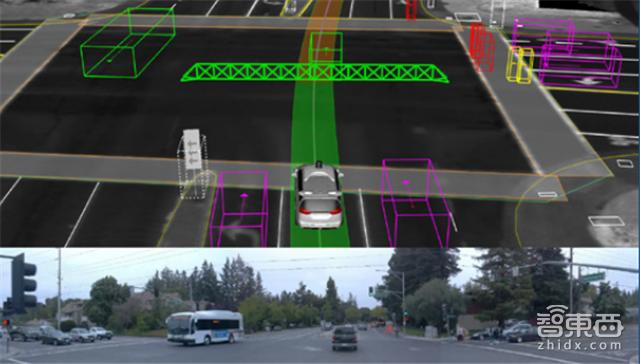
汽車的感測器需要不斷地掃瞄周邊的物體併進行辨認:行人、非機動車、機動車、交通信號、道路施工、障礙、各種路段 (鐵路) 、停車標誌等。目前,汽車 (無人駕駛) 的視距是 300 公尺。
- 接下來可能發生什麼?

這就需要軟體加持,瞭解行人、機動車和非機動車的軌跡,結合道路規則和狀況訊息,分析並預測相關的動態對象運動趨勢,考慮本車運動可能對周圍環境/行人帶來的影響。
- 怎麼做出判斷?
有了分析和預測模型,接下來就是決策,從多個可行的路線中尋求最優解,考慮需要的轉向操作,精確軌跡、速度、車道等,並保持 360 度環境監控,以保證能實時、安全的應對路況變化。
因此,全自動駕駛,本質上就是對於基於感測器、地圖等獲取的多種訊息進行整合分析,技術核心在於硬體 (感測器套件) 和軟體 (分析、預測模型) 。
硬體:四類感測器套件
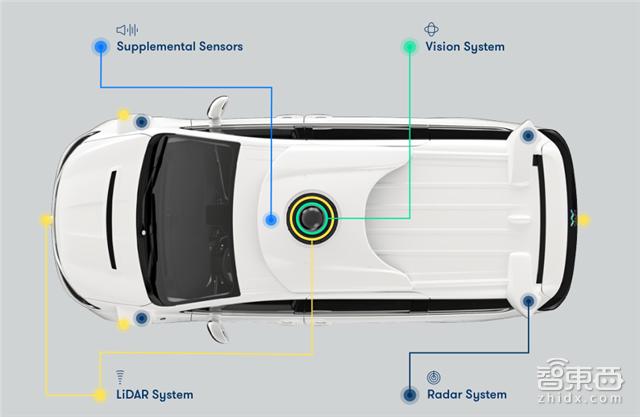
Waymo 的感測器套件包括四個主要單元,雷射、相機、雷達和輔助,以實現 360 度的 300 公尺視距,重構動態和靜態對象的 3D 圖象 (行人、行駛中的自行車或其他交通工具、交通信號燈、建築物、道路標誌等) 。
其中,雷射雷達系統 (LiDAR) 適用於日夜公里工作,每秒進行數百萬次 360 度的脈衝雷射發射,並接受反射信號分析之,實現測距,以獲得周圍的物體空間分佈。一個中檔的高分辨率雷射雷達,以及一個強大的新一代遠程雷射雷達,“視覺”範圍接近三個足球場。據悉, Waymo 已經將雷射雷達的成本從最初的 15 萬美元降低至 7500 美元。
基於相機的視覺系統類似人眼功能, Waymo 的視覺系統由多個相機組成,以適應不同光照條件的成像,是全方位視角 (360 度) 的,而不是人類司機的 120 度視野。該系統主要用於檢測顏色,實現高分辨率的物體識別 (如交通信號燈、建築物、校車、緊急閃爍燈等) 。
雷達系統則是利用波長來感知物體,在特殊天氣條件 (雨、雪、霧) 下依然工作有效,用於追蹤前方車輛,並“觀察”附近 (左右,前後) 車輛行駛的速度等。
輔助/附加感測器包括音頻檢測系統,可以聽見數百英呎範圍內的鳴車、警報等情況 (警車、救護車) ,結合 GPS 訊息,以強化汽車對於物理世界狀況的認知。
軟體:能用且安全的汽車大腦
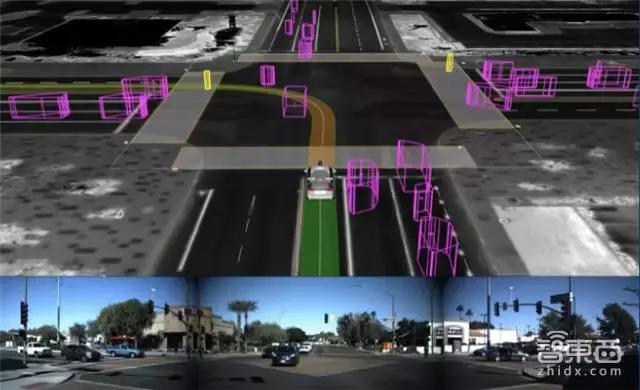
 (Waymo 的 3D 地圖示意)
(Waymo 的 3D 地圖示意)
有了感測器提供的龐大訊息,就能塑造實時道路圖象 (不僅僅是衛星地圖或在線地圖,包括有色的物理空間分佈,以及物體行動速度、航向、加速度等) ,接下來就是通過軟體系統實現最優駕駛決策了。Waymo 的軟體設計、測試和優化已經有 8 年之久,並引進了機器學習,進行了數十億英里的模擬駕駛,完成了 350 萬多英里的路測經驗。
該系統涉及路況訊息理解 (地形、道路、天氣、交通法規等) 和行為預測 (需要對不同的物體,如行人、各類機動車、各類非機動車等,進行不同的建模) ,需要根據以上訊息,結合安全距離設置 (為行人和車輛留下額外的誤差空間) ,求解可操作的駕駛行為 (ODD) ,規劃行駛路徑和眼下的行駛速度、方向。
一般來說,自動駕駛系統還會對風險條件進行評估,以確定行車能夠安全抵達目的地,自動化程度較低的車輛在複雜路況將會把車輛控制權交回給人類駕駛員 (後備方案) 。不過, Waymo 的目標就是全自動駕駛啊。因此,系統設計會考慮多種道路、氣候場景,實際行駛中每秒會對車輛設備運行狀態進行數千次的故障檢測。
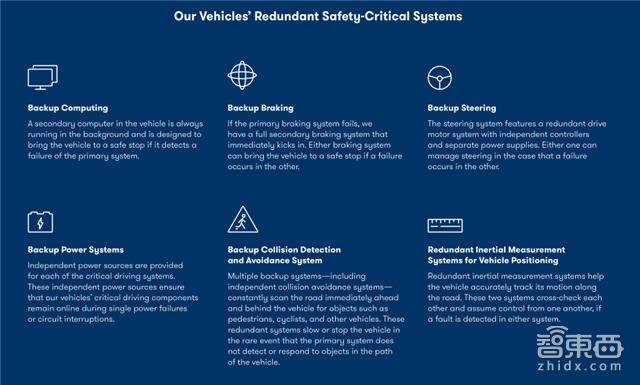
汽車,尤其是自動駕駛,更尤其是全自動駕駛,最為人關注的是安全問題,對於安全系統, Waymo 從五個角度進行了系統設計:
1. 行為安全 – 降低行駛意外發生可能性
該系統針對駕駛決策,即考慮交通規則限制和相關情景預測,並通過路測 (可以說是技術核心了) 發現可能的各種問題,進行不斷的調整分析模型和模擬工具。
2. 功能安全 – 解決硬體失靈/故障問題
該系統針對可能發生的設備故障,即為了確保車輛硬體的正常運行和安全運行,設置備份系統和備用設備。該系統將對數據、系統進行實時備份,設置冗餘慣性測量 (交叉檢測) ,檢測硬體狀態,如有故障則改接備用電腦、方向盤、剎車、動力系統、避障系統 (結合 NHTSA 的致命事故數據,考慮大型車、摩托車、行人、車輛轉彎、交叉路口等潛在危險情況) 等。
3. 碰撞安全 – 強化車輛耐撞性
該系統針對車輛碰撞事件,即車輛保護乘客的能力。這就需要對車輛的結構設計 (如,座椅限制) 、保護裝置 (如,安全氣囊) 進行考量,以達到公路交通安全管理局設置的 FMVSS (聯邦機動車安全標準) ,這方面需要 Waymo 與硬體製造商之間的協商合作。
4. 操作安全 – 應對多樣的乘客需求
該系統針對車輛與乘客之間的交互,提供具有目的地設置、停車引導等功能的用戶界面,優化乘客體驗,針對不同的行駛需求設定危險分析、相關安全標準、大量測試和多領域實踐。
5. 無碰撞安全 – 保證車內安全
該系統針對車內可能發生的危險情況而設置,即電力系統、感測器故障可能對技術人員、測試司機、乘客造成的人身傷害。
此外, Waymo 還設置了事故後緊急系統,會自動發送事故地點給執法人員和急救人團,以及官方團隊操作中心。
而很多人擔心的網路安全問題, Waymo 靠著 Google 這個大樹(6469-TW),採用了以下六招:構建可驗證的軟體系統,加密並校驗通信通道,為關鍵系統構建冗餘的安全措施,限制關鍵系統之間的通信,提供及時的軟體更新,設置了分級的風險識別。 Waymo 還加入面向車聯網安全的行業協會 Auto-ISAC 推動行業合作。
測試:整車+硬體+軟體
綜上可知,Waymo 自動駕駛車輛包括三個基本系統:OEM提供的原車、內部硬體 (感測器和電腦) 、軟體系統。每一個子系統都是獨立完整的,會分別經過測試和驗證,然後整合在一起。
首先,車輛會經過基本的安全測量,即聯邦機動車安全標準 (FMVSS),目前 Waymo 的改良版菲亞特克萊斯勒混動麵包車已經通過其對美國機動車或機動車設備的安全性要求。
然後,車輛會進行 Waymo 和菲亞特克萊斯勒汽車 (FCA) 的硬體測試 (生命週期、極端環境條件下可靠性和耐久性) ,包括實驗室的硬體 (剎車等) 功能性測試和私人軌道測試環節。
軟體測試則包括模擬測試、封閉測試和實際道路測試。
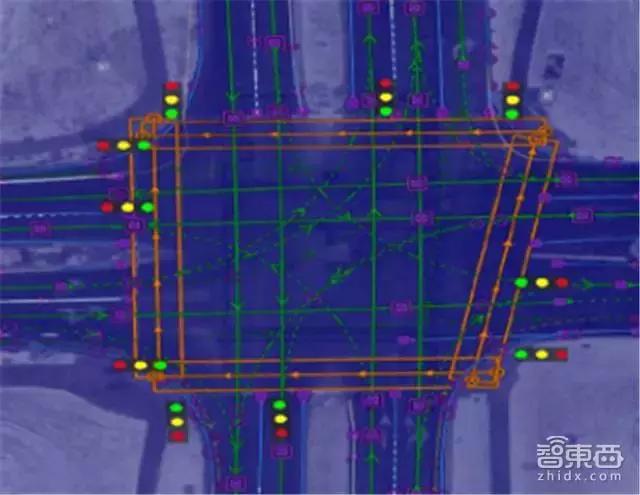
 (鳳凰城東谷高精實時地圖)
(鳳凰城東谷高精實時地圖)
模擬測試主要是基於高精地圖設置虛擬場景,面向可能的多樣的複雜路況進行多次模擬 (每天 25 萬輛虛擬的自動駕駛汽車模擬行駛 800 萬英里) ,從上千種方案中找到車輛轉彎、變速等操作的最優解併進行重複驗證和疊代;
封閉測試則是在公司所有的道路上 (91 英畝,2 萬多虛擬場景) 測試各版軟體系統的特定功能,一旦確認軟體符合預期, Waymo 便會將新的軟體安裝到路測車輛上;
道路實測會對同一行駛路線進行多車多次測試,校正偏差。更多的行駛里程將有助於監控和評估軟體可靠性,獲得反饋。目前, Waymo 已經在 20 多個城市行駛了 350 萬英里,經歷了沙漠地帶、雨天、風洞測試、極端溫度 (主要是看感測器會否正常工作) 等,達到了美國汽車工程師協會 (SAE) 認證的 4 級安全水準。
應用界面設計
自動駕駛汽車,顯然不需要面向司機,而是乘客。因此,如何實現安全的易訪問性 (特別是面向視覺、聽覺障礙人士的交互工具) 、界面可視化 (目的地、當前速度和路線規劃) ,提供無縫的操作交接等,才是需要考慮的設計。需要能夠顯示音頻訊息和視覺訊息,提示安全操作 (安全帶等) ,提供簡明的行程確認 (啟動、靠邊停車按鈕) ,引入行動 App,提供駕駛幫助 (執法部門、急救人員、專家團隊在線交流和緊急情況協助) 。
Waymo 商業化三招

- 拉攏合作:英特爾+菲亞特+ Lyft
標題的三個合作方只是示例,但已經代表了三大類別:計算平台、OEM、應用場景。
9 月,英特爾宣佈,將與 Waymo 合作,為 L4、L5 自動駕駛車輛提供計算平台。事實上, Waymo 的無人駕駛 Chrysler Pacifica 麵包車,從連接到感測器數據處理都採用英特爾製造的技術。對的,這個英特爾,就是 150 億美元買了特斯拉(Tesla, TSLA-US)技術供應商 Mobileye 的那個英特爾。
而這裡提到的 Chrysler Pacifica,也就是經過改裝的菲亞特 – 克萊斯勒混動 MPV Pacifica,2017 款。根據外媒 The Information,Pacifica 在出廠時,頂部就為安裝 LiDAR 等感測器留了一個圓孔。
Waymo 也曾試圖將無人駕駛技術應用於本田測試車型,但本田老大八鄉隆弘表示:磋商 (在本田車上裝 Waymo 硬體還是讓本田為 Waymo 生產路測 OEM) 7 個月沒進展。還有知情人士透露, Google 曾試圖與福特(FORD, F-US) (FORD) 展開合作,但雙方在自動駕駛汽車收集來的數據流的使用權上存在分歧。
再來看 Lyft 的合作,這是紐約時報 5 月透露的,Waymo 已與叫車服務創業公司 Lyft 達成合作協議:雙方將通過試行項目和產品開發努力來將無人駕駛汽車技術帶來主流市場。按照協議,雙方計劃未來幾年使用 Lyft 的叫車網路來測試 Chevrolet Bolt 無人駕駛汽車。
- 樹威信:就是針對 Uber
Uber 於 2015 年在匹茲堡設立了專用於無人駕駛汽車研究的先進技術中心,並在 2016 年以 6.8 億美元收購自動駕駛初創企業 Otto,並開始了無人出租試驗 (在匹茲堡,但今年 3 月的一次故障後,該項目擱淺) 。然後, Uber 就被 Waymo 告了。
Otto 的創始人就是 Waymo 前工程師 Anthony Levandowski (雖然目前已被 Uber 解僱) , Waymo 認為自家機密技術 (原代碼、設備照片、1.4 萬份機密文件) 被盜了。路透社披露,本月 Waymo 向 Uber 提出了 10 億美元的庭外和解費 (原預估損失費 19 億美元) ,並要求 Uber 公開道歉,永久禁止使用相關智慧財產權。不僅技術上打擊 Uber ,合作 Lyft 可能也摻了點複雜的“心理活動”吧。
- 做宣傳:拉攏公益組織
月初, Waymo 與五家美國公益組織 (反醉駕的母親協會、國家安全委員會、老年生活協會、盲人兒童協會、鳳凰城東谷協會) 向美國公眾科普自動駕駛技術及其進展,宣傳自動駕駛將給消費者和社會帶來的好處:安全、高效。
Waymo 老總 John Krafcik 在微博中表示將會在亞利桑那州進行”Let’s Talk Self-Driving”的線上、戶外、收音機廣告宣傳。有分析指出,這波面向民眾,或者說消費群體的宣傳,以亞利桑那州為落地點的原因是,今年年底 Waymo 將在亞利桑那州的鳳凰城運營自動駕駛叫車服務,且該州政策最為友好。而“醉駕”、“老年”、“盲人”、“社區”等宣傳關鍵詞,可以說是自動駕駛戳中市場需求最直接、深刻的點。
不同於很多科技巨頭 (V2X) 和汽車製造商 (ADAS) 的定位, Waymo 很偏激的瞄準了全自動駕駛。
技術上,這就需要需要基於基本規則設計車輛功能框架,在此基礎上利用四類感測器套件獲取相關的實時道路訊息,進一步為汽車的“大腦”對行駛方案的求解提供限制條件,龐大的實時數據對計算能力提出了要求,因此需要針對多種可能性預設各類分析、預測模型,引入機器學習算法和測試 – 反饋機制更新系統版本,並採用本地-雲端結合的計算方案。事實上,從現有的路測成績來看, Waymo 在自動駕駛技術領域確實優勢明顯。
安全性方面, Waymo 在傳統汽車硬體安全的基礎上,從冗餘檢測和備用系統兩方面提供了基本行車安全保障,並設計了避障系統、網路安全通道、多維可靠性測試等。此外,Android 的經驗強化了 Google 的硬體野心,可以從 Waymo 的規劃中看到:它通過車輛整體安全性設計和系統授權的方式,對硬體合作方 (OEM) 表達了更為強硬的態度;CEO John Krafcik 還曾表示,車輛的關鍵零組件和安全解決方案的重要組成 Waymo 已經爛熟於心。
《雪球》授權轉載
【延伸閱讀】