1

商業
Mobileye對自己的定位相當清楚,一家以AI、圖像識別技術為基礎提供自動駕駛所需高準度地圖的技術供應商。
CES之前,看到Keynote的演講裡,Mobileye的內容介紹中赫然寫著「自動駕駛技術路線的發展與未來規劃」時,筆者一點兒也不意外。Mobileye的視覺處理產品EyeQ使用的圖像處理技術,對於自動駕駛來說,實在是個很好的基礎。而且特斯拉(Tesla, TSLA-US)7.0更新之後帶來的AutoPilot中就有Mobileye的技術。
不過,怎麼做是個很大的問題,這裡面需要考量的因素有很多。Mobileye的聯合創始人兼CTO Amnon Shashua教授,則花了一個半小時不到的時間,把這件事情講得清清楚楚了。
答案就是下面這張圖:
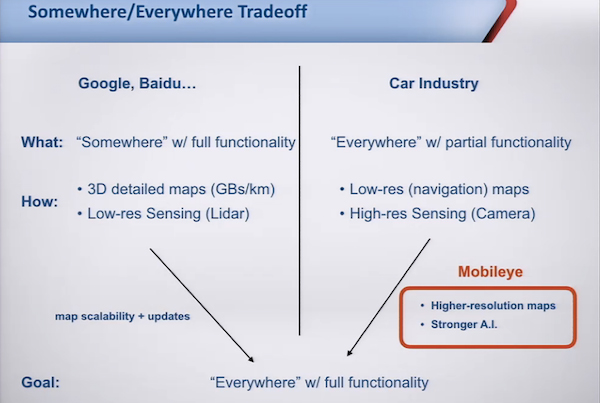
ΔMobileye在自動駕駛的解決方案
越來越多的OEM都開始坐不住,慢慢公佈自己的自動駕駛相關技術了,要嘛各種宣傳攻勢一起上,要嘛就是把正在研發的車拉出去溜幾圈—看見沒?這些車已經達到上路標準了。所以,要做自動駕駛,必須要明確三個問題。
第一個問題─身份。所謂身份,也就是說Mobileye打算參與到自動駕駛的哪一個部分。這一點上,筆者對於Mobileye的定位同樣不意外。鑑於之前一貫的產業位置,Mobileye的選擇依然是供應商。身為一家供應商,那就表明,與最終進行實施的OEM沒有任何競爭關係,而是合作夥伴。
第二個問題─入口。所謂入口,是指Mobileye進入自動駕駛產業,打算以什麼作為核心競爭點。這個問題的答案,想必大家也都不陌生—地圖。不論是科技界的一朵奇葩,還是各大車廠,都不會否認地圖在自動駕駛中的重要性,不然ABB也不會聯合收購HERE,而圖商之間隱形的硝煙更是不曾斷過。
但是,此地圖非彼地圖。這就涉及到第三個問題了,途徑。要怎麼去做高準度地圖,買無數輛街景車去做測繪?No,這是最笨的辦法,且不說其他層面,但就實施層面來看,要想去圖商獲得競爭力,所花的各項成本都太高。更為關鍵的是,大把的人力物力財力花出去,還不一定能夠得到想要的結果。
所以,Shashua教授表示,Mobileye打算用AI來製作高準度地圖。這個所謂的AI,指的是具備深度學習功能的圖像識別體系。以車載鏡頭監控到的畫面為基礎,分析出畫面中的車道線、各項道路標誌、以及道路上的基礎交通設施(交通號誌、攝影機等),並以此構建能夠讓車輛「看得懂的高清地圖」。
從最後的途徑來看,也就明白Mobileye為什麼把自己定義為供應商了。因為自動駕駛所需要的地圖,不僅僅得是高準度的,還得是能夠即時更新的,再一個就是獲取成本低。要想有競爭力的話,成本是個很重要的東西。
與車廠合作,借助不同品牌大量的車輛上鏡頭獲取到的數據,能夠作為地圖的數據來源,能夠保證數據的更新率;車載鏡頭的普及率越來越高,並沒有增加額外的硬體,而且這種情況下,與車廠也有更多的商業模式可以選擇,可以不只是簡單的出售地圖或者俱備深度學習能力的軟體算法。
一輛車要能夠自動駕駛需要什麼能力,想必不用筆者再贅述了。簡單來說,那就是,要有一雙能看懂當前情況的眼睛、一個運轉足夠迅速懂得如何駕駛的大腦以及與大腦配合良好的四肢。也就是感知能力與駕駛策略,地圖起到的是輔助作用,讓車輛知道自己在哪兒,知道周圍路標的含義、路口的位置等。
在感知方面,靠的就是Mobileye的看家本領鏡頭了,未來將結合鏡頭、雷達與激光雷達等多重技術。目前已經投入市場的EyeQ3可以通過前方單顆鏡頭實現防碰撞預警;將在2017年面世的EyeQ4將會配備3顆鏡頭和車身周圍的雷達和激光探測設備,實現高速公路上的半自動駕駛;在那之後,Mobileye會進行EyeQ4升級,變成5顆鏡頭,增加更多探測設備,並整合更新的軟體系統,實現全自動駕駛。
這裡有一套Road Experience Management(道路經驗管理,下稱REM)系統,即是利用深度學習技術來完成對道路上各種表示的識別和採集。
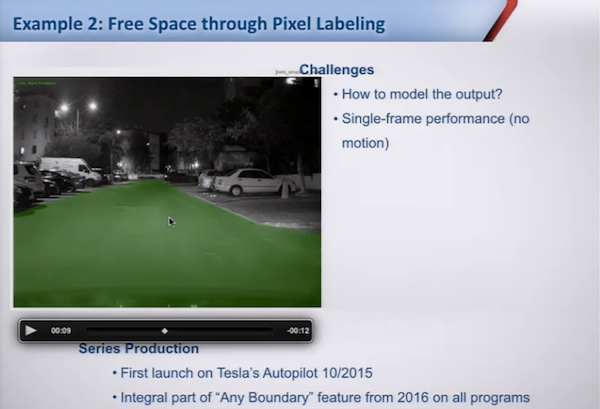
ΔREM識別出可行徑路徑
舉個例子,現有的ADAS技術都是依靠車道標線來保持車輛在車道內行駛,而一旦車道兩旁標線不清晰、被大雪覆蓋、或者壓根就沒有標線的情況下,系統便很難工作。那麼REM所需要做的就是根據環境綜合分析路況,比如前車運動軌跡、路邊靜止的物體等共同考慮,判斷出一條合適的行駛路線。同樣,系統也將能夠分辨出當下可行駛的道路,不會將車輛開到小區裡空的停車位上、或者在沒有詳細資訊的道路上開到自行車道上去。
Mobileye要做的高準度地圖是專門針對自動駕駛的,稱其為Roadbook(路書)。路書收集收集的重點放在路上的各種導流標誌、方向標識、信號燈等,依靠這些建立的路標,從微觀上在行駛過程中為車輛提供指引。這種收集方式可以改善由整到零那種傳統方式所帶來的高成本、速度慢的缺點。
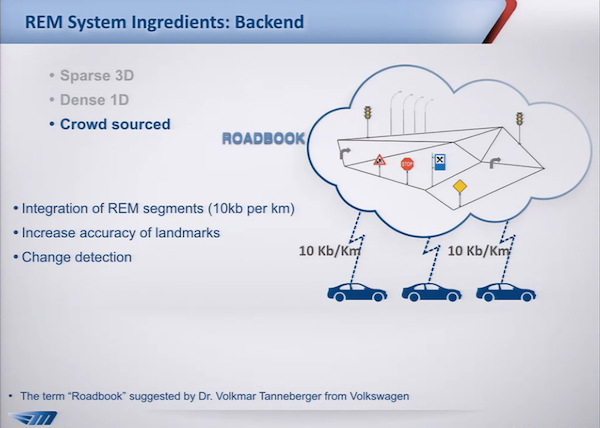
ΔRoadbook所包含的信息
而且,這種收集方式中,對於採集到的資訊,會在本地進行預處理,數據以簡單的一維數據為主,近處為一維,只結合必要的三維數據,最終讓每公里的地圖訊息大小控制在10kb以內,方便信息的上傳與下載。
駕駛策略則是最難的一部分。對於未來自動駕駛的發展,Mobileye的側重點是如何使其具有類似有人駕駛一樣的駕駛行為。駕駛行為本就具有很強交互屬性,在駕駛過程中幾乎無時無刻不在與其他交通參與者進行互動。除了 要增強車輛的感知能力,更重要的是讓系統可以像人類一樣學習適應交通環境。
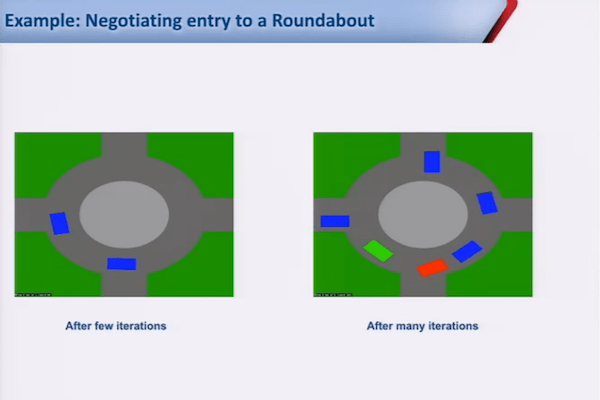
通過深度學習掌握通過十字路口的方式
比如像經過環島這種比較複雜的路況時,一些人類駕駛員也並不能很快上手,自動駕駛系統同樣如此,剛開始也不會掌握到特別合適的時機。但經過最初幾次不太熟悉的類似路況,系統可以自我完善和學習,逐漸可以根據環島內車輛的速度加之以前的經驗,判斷這是不是一個進入和駛出環島合適的時機。久而久之,系統會比可能會分心的人類更加熟練地應付這些複雜的路況,從而真正達到自動駕駛最核心的目的。
如果對筆者關注時間比較久,自然會記得筆者此前曾解讀過德國馬牌ITS部門的一套方案,叫做RoadDB(Road Database),與路書系統有異曲同工之妙。所以,在「為自動駕駛定制高準度地圖」這件事情上,Mobileye並不是第一家,但也絕對不會是最後一家。
德國馬牌與Mobileye之所以會選擇這種方式來切入自動駕駛,除了此前供應商的身份能夠為這種數據群眾外包的模式提供很好的便利、具有相當的硬體部署基礎之外,更是因為地圖一直被掌握在少數人手裡,隨著自動駕駛研究的深入,越來越是稀缺資源。既然有這個便利的基礎,何不為自己開發新的商業模式呢?
而有著相同基礎、喜歡供應商這個身份的,自然不獨於這兩家,未來肯定還會有更多人加入。大家也許在具體實施方法和技術上會有不同優劣,但基本屬於同種模式下的求同存異。
當然,我們也要看到,在其他技術供應商找到新的地圖內容生產方式時,圖商們也在積極轉型。HERE在本次CES上發布的HD Live地圖,能 夠利用車載感測器數據通過雲端來更新地圖,就是個例子。圖商與其他的自動駕駛技術供應商們,都手握各自的優勢朝著這同一個目標前進。
那決定勝負的因素是什麼?除了在深度學習、圖像識別與處理領域的造詣之外,誰能夠儘早一步達到數據互通,誰也能掌握先機。現在Mobileye雖然在與三家公司(通用、福斯與一家依然處於保密期的公司)進行合作,但是彼此之間的數據還是獨立的;HERE的感測器統一接口標準的事情,還沒有下文;而德國馬牌,不同車廠之間的數據互通,也是Phase 2的目標。
《車云網》授權轉載
超好賺!
每天都有任務能拿獎勵,快點擊查看!